Simulation and Control of Mining
Industry Vehicles in Virtual
Reality Environments
Vehicle Modelling
Four wheel drive four wheel steering vehicle model chosen for high maneuverability and controllability in mining applications. Vehicle controls (steering and velocity) calculated to implement path following algorithms based on an equivalent two wheel drive two wheel steering vehicle model.

Path following control laws
Path following controllers implemented in Matlab & Simulink environment
- Instantaneous center of rotation control
- Alonzo-Kelly control
- Lyapunov-based control
- Self-developed Hybrid Lyapunov-based + Alonzo Kelly control

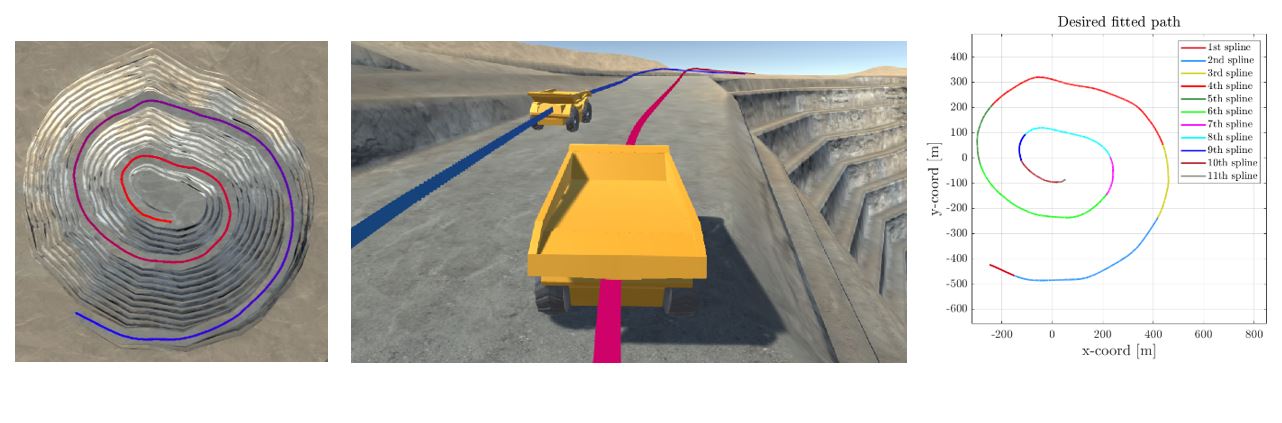
Self-developed spline fitting program
Totally self-developed spline fitting program created in Matlab, with the aim of enabling the automatic fitting of 2D paths like a complete mine spiral or even complex user-defined trajectories.

Animation in Mine Virtual Environment
Real-case scenario for mining applications => 2 autonomous drive vehicles performing maneuvers for being loaded & unloaded.

User-defined path
Two-dimensional custom path defined by the user in Unity by means of a mouse. Path fitted with self-developed spline fitting program and vehicle controls generated with ICR algorithm to track the desired path. Real Time TCP/IP communication between Matlab and Unity.
