
POINT-TO-POINT PATH PLANNING PROJECT – Group 2
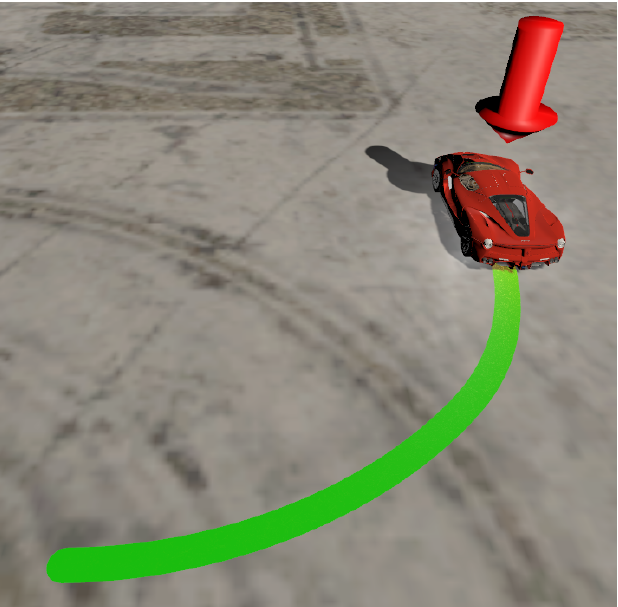
ROBOTIC PERCEPTION AND ACTION 2018/2019 PROJECT WORK – POINT TO POINT PATH PLANNING WITH CHAINED FORM SYSTEMS Students: Alberto Gabriel, Jacopo Losi, Marco Moletta, Nicola Saljoughi “In a point to point path planning the robot must reach a final position…